
MeArm Open Source Robotic Arm Plans, Kits and Information
MeCon Motion Control Software for MeArm Robotic Arm
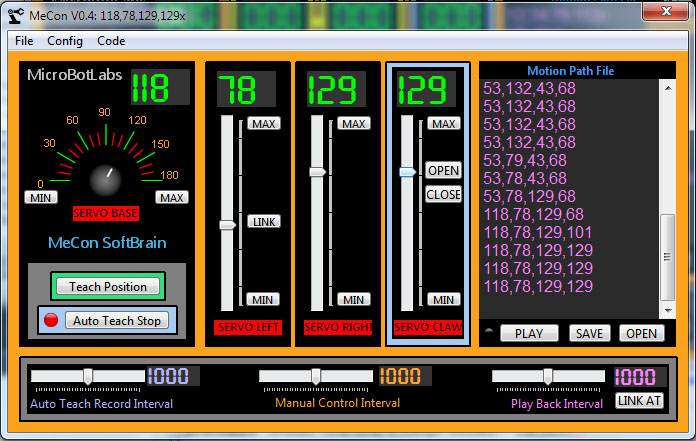
MeCon is a Win OS program that allows for easy motion control of the hobby servo motor based MeArm. no need to build a hardware base control system. MeCon lets you test you robot arm out fast by using its on screen GUI to manipulate the 4 servos that make up the MeArms motor control.
With its teach function you can record motion path files for later automatic play back. The GUI allows mouse dragging to manipulate the controls as well as mouse wheel and clicks. You can use the key board as well and control each axis with a key press.
MeCon communicates via com port with the Arduino micro controller threw the same USB cable and ports used to program the Arduino with its IDE. it also has some cool experimental functions such as linking 2 axis with a ratio. this allows for some movement paths that might be difficult to produce by manually controlling one axis at a time.
MeCon is in active development on a win7 system with many more features planed.
Using the MeCon Software
Since this is an early version and things and behaviors will change there is not a comprehensive usage tutorial yet. its best to just explore the settings and try things out.
FONTS! MeCon Currently use a font called Ticking Timebomb BB you can download it for free and there is a zipped copy on the CD-ROM. the font must be installed on your computer in order for MeCon to use it. I recommend this because it looks really cool! but you can set MeCon to use any font you want by going to the config menu and clicking on the "SET READOUT FONTS" button.
Connect to the Arduino micro controller by going to the config menu and open the correct com port (same port as what the Arduino IDE connects to)
MeCon is sending serial comands to the Arduino one line at a time in the format of position values for each servo. it looks like this:
Value1,Value2,Value3,Value4x
Values are a number between 1 and 180.
They are separated by a ,
After the last value a lower case x terminates the line of data.
You will see these numbers in the position readouts and motion path file when recording MeArms motions.
On the bottom of the MeCon screen are three interval timer adjustments these determine how often this data is sent and or recorded. the units are in milliseconds so set these to a fairly low number (50-200) to get smoother arm motion.
Explore with the mouse, mouse wheel and keyboard to discover how the on screen sliders and knob are adjusted. hovering the mouse pointer over a control allows adjustment via mouse. selecting a control by clicking on it allows adjustment with keyboard arrow keys. if you have a mouse wheel you can control two axis at the same time by selecting one control for keyboard input and hovering the mouse pointer over another and spinning the mouse wheel.
As the software matures I will update this information with the added functionality, bug fixes etc.
License